引言
引言
专为具有实时本地目标检测和人车属性分析功能而设计的完整NVR。使用 OpenCV 和 Tensorflow/Tesnsorrt/ONNX 在本地为网络摄像机执行实时目标检测和人车特征分析。
使用 Google Coral Accelerator 是可选的,但强烈建议使用。CPU 检测只能用于测试目的。Coral 的性能甚至优于最好的 CPU,且能以很少的开销处理 100+ FPS。
- 通过定制组件与Home Assistant紧密集成
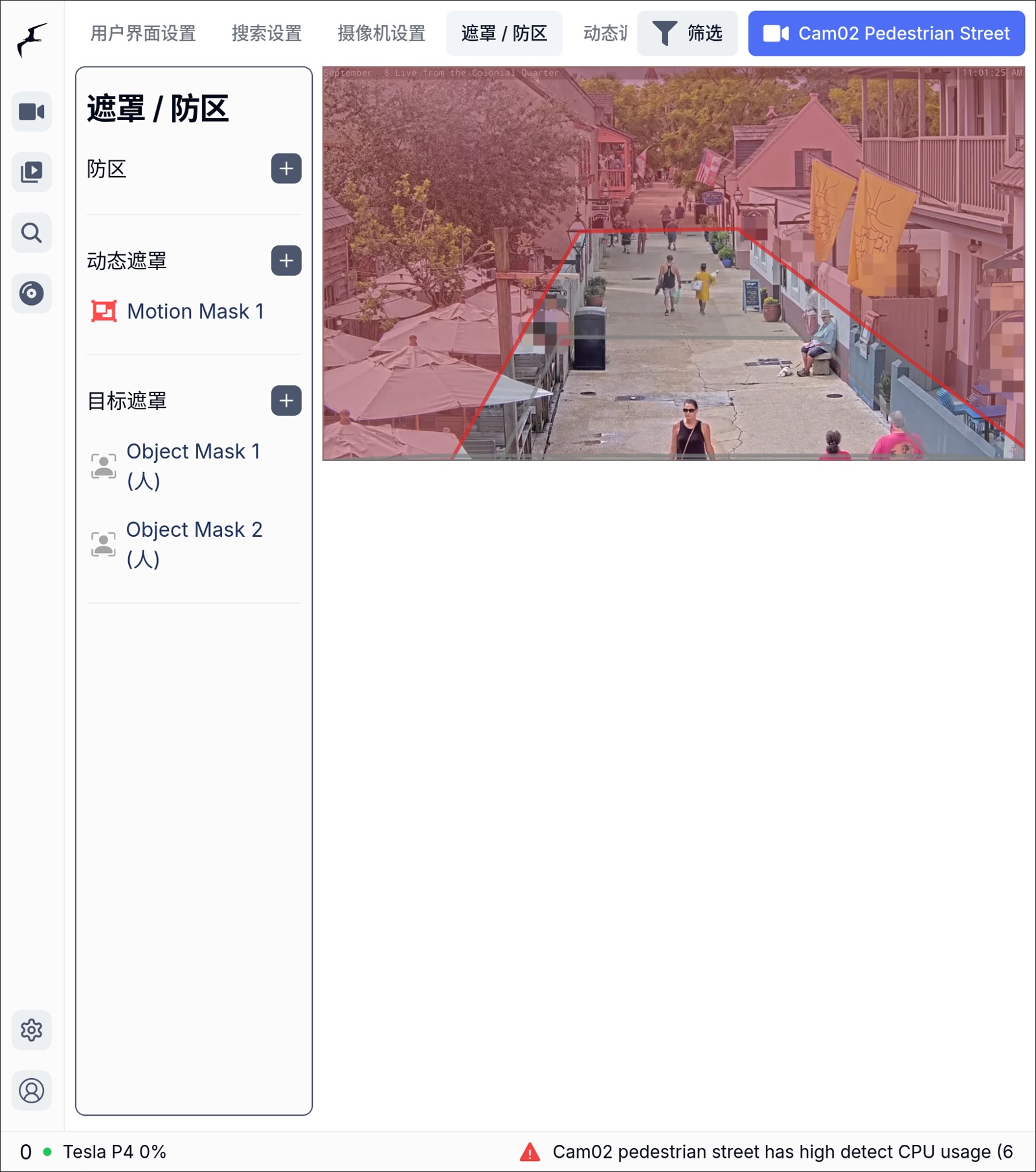
- 旨在通过仅在需要的时间和地点查找目标来最大程度地减少资源使用,并最大限度地提高性能。
- 充分利用多进程,强调实时性而不是处理每一帧
- 使用非常低开销的动态侦测来确定在何处运行目标检测
- 目标检测在单独的进程中运行,以实现最大FPS
- 通过MQTT进行通信,以便轻松集成到其他系统
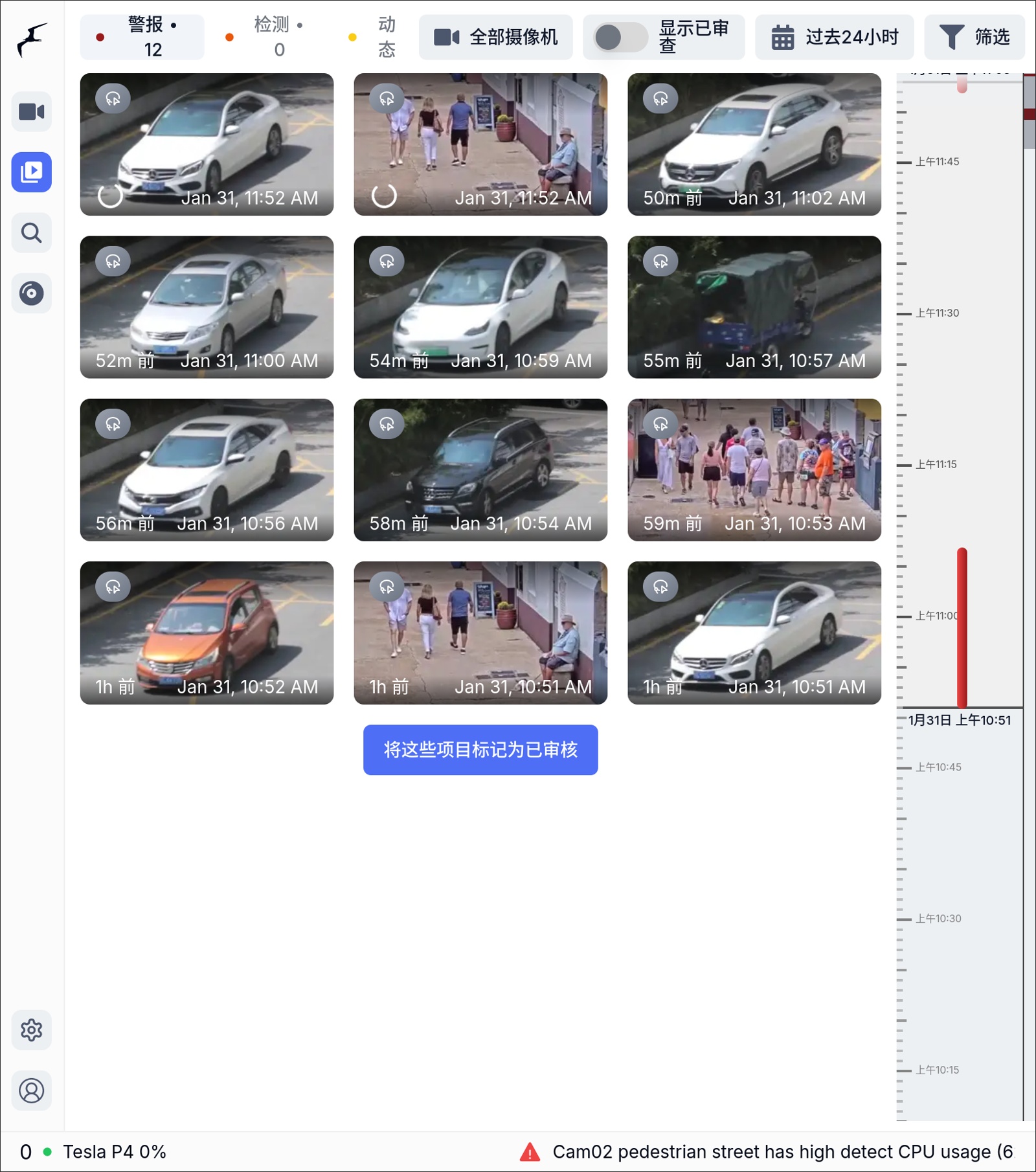
- 基于检测到的目标进行录像存储
- 24/7 录像
- 通过RTSP重新串流以减少与摄像机的连接数
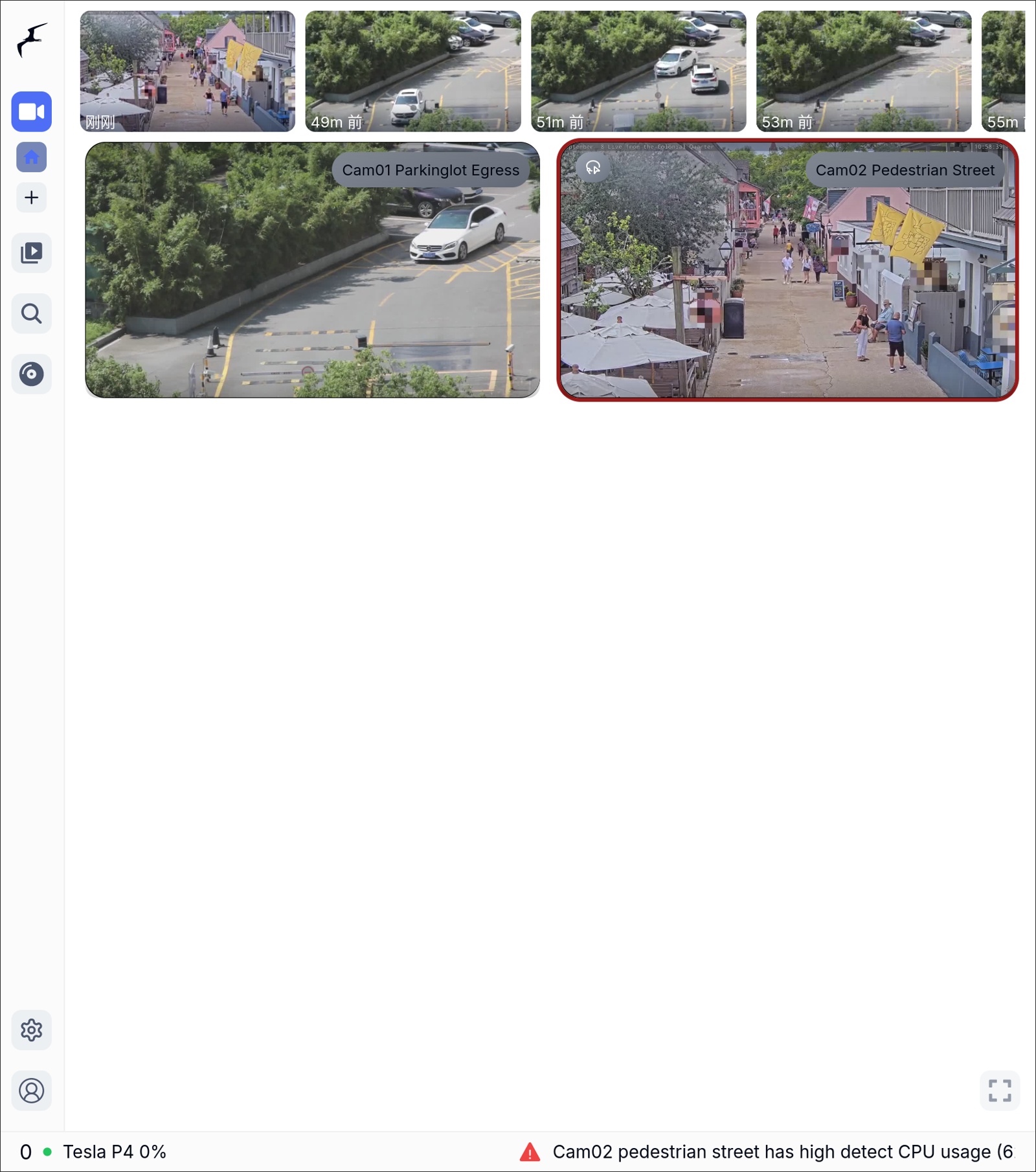
- 所有目标跟踪摄像机的动态组合视图。
屏幕截图